
Robotique Guidée par Vision & Intelligence Artificielle : Une explication pour les Non-Techniques
L’industrie de l’automatisation et les capacités technologiques connaissent une très forte croissance. Afin d’expliquer la complexité de la technologie, nous employons des termes tels que « intelligence artificielle » pour transmettre l’idée que les solutions sont plus performantes et avancées que jamais. Si vous êtes un investisseur, un chef d’entreprise ou un adepte de la technologie qui cherche à en savoir plus sur les technologies dans lesquelles vous investissez, cet article est fait pour vous. Ce qui suit est une explication de la robotique guidée par vision et des algorithmes d’apprentissage profond, appelés aussi deep learning.
Il est vrai que l’article s’intitule « intelligence artificielle » et pourtant à la fin du premier paragraphe, nous parlons déjà d’algorithmes de deep learning ! Les médias de l’industrie tentent de vous convaincre que « Intelligence Artificielle = avant-gardiste et de grande valeur » tandis que « Deep Learning = ringard et geek ». Si vous êtes un ingénieur visionnaire qui développe sa propre solution, cet article peut vous divertir. Si vous êtes un chef d’entreprise qui veut comprendre les bases, cet article vous est spécialement destiné.
Cet article couvre les sujets suivants :
- Type de systèmes de vision utilisés dans les entrepôts et les secteurs de la distribution
- Eléments fondamentaux des systèmes de deep learning
- Système de vision deep-learning pour les robots industriels guidés par vision
Type de systèmes de vision utilisés dans les entrepôts et les secteurs de la distribution
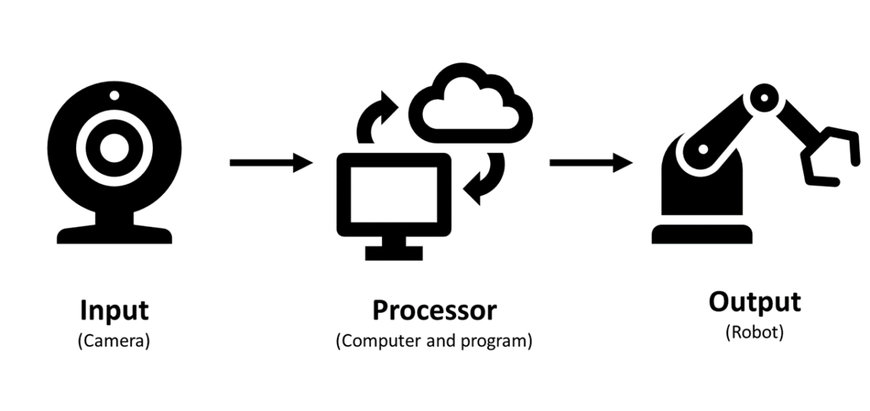
Il existe trois types ou applications principales de systèmes de vision utilisés dans les entrepôts et les secteurs de la distribution. Il s’agit de contrôle et planification, de pick-and-place sans deep learning et de pick-and-place avec deep-learning. Tous les types de systèmes de vision comprennent trois éléments principaux : des données (transmises par caméra), un processeur (effectué par un ordinateur et un logiciel) et des résultats (par le robot). Tous les systèmes peuvent utiliser des caméras et des robots similaires. Ce qui fait la différence, c’est le logiciel.
Contrôle et planification
Les systèmes de vision de contrôle sont utilisés pour différentes applications par les robots industriels, fournissant des résultats tels que « réussite/échec », « présent/absent » ou une valeur de mesure. Dans le processus, c’est le résultat qui dicte l’étape suivante. Par exemple, il est possible d’utiliser un système de vision dans un robot de production pour vérifier les quantités, les couleurs ou d’autres attributs prédéfinis (ex : 3 rouges, 1 jaune, 2 bleus). Les résultats sont communiqués à un système de traitement externe qui prend un ensemble prescrit de mesures prédéterminées.
Les systèmes de planification sont moins fréquemment utilisés mais ressemblent aux systèmes de contrôle, dans le sens où les plan de vision ne se traduisent pas directement par une action de la machine. Un exemple est celui des robots mobiles basés sur la navigation visuelle (par exemple, Seegrid). Le plan est créé et stocké dans une base de données. Les itinéraires souhaités sont précalculé. Lorsque le robot s’articule à travers les trajectoires préprogrammée du système, le système de vision offre la possibilité de déterminer la position X-Y du robot sur une carte connue. Un algorithme de routage externe fournit des instructions au robot (continuer vers l’avant, tourner à gauche, etc.) en utilisant la carte connue et la diffusion en directe des images prises par la caméra.
Les systèmes de contrôle et de planification peuvent être très sophistiqués, y compris les algorithmes de routage qui guident les robots mobiles. Cependant, ces derniers ne nécessitent pas d’intelligence artificielle ou de deep learning.
Pick-and-Place, sans apprentissage
Des systèmes de vision pick-and-place sont déployés sur la plupart des cellules robotiques installées aujourd’hui. Une application typique est celle du pick-and-place dans les secteurs de production avec des variables limitées. Par exemple, prendre la partie A, B ou C d’une zone définie et la placer dans une zone définie. Ces systèmes peuvent différencier les objets et l’arrière-plan en fonction d’entités simples telles que la forme, la taille et la couleur. Les caméras dirigent les mouvements du robot grâce à des données fournies en circuit-fermé, permettant aux robots de fonctionner très rapidement et avec précision, dans les limites de leurs paramètres prescrits.

Ces systèmes n’ont pas de « circuit d’apprentissage » qui permet au système d’être plus intelligent aujourd’hui que le jour où il a été programmé. Ils sont préprogrammés pour un ensemble fixe de sujets et d’instructions. Bien que ces systèmes soient « intelligents », ils n’ajoutent pas d’intelligence ou d’apprentissage au fil du temps.
À titre de comparaison, cela donnerait l’impression de posséder un véhicule autonome qui ne pourrait circuler que sur des routes connues et dans des conditions météorologiques et de circulation préprogrammées. La voiture pouvait accélérer et ralentir, changer de voie, s’arrêter aux feux... mais si une nouvelle route est construite, la voiture ne serait pas en mesure de conduire sur celle-ci. Serait-ce une super technologie ? Sans aucun doute. Aurait-elle ses limites ? Oui.
Deep Learning (alias Intelligence Artificielle)
Les systèmes de vision les plus sophistiqués utilisent le « deep learning ». Ces systèmes sont souvent décrits avec des termes impressionnants tels que « intelligence artificielle ». Pour compliquer encore les choses, de nombreux systèmes non dotés de deep learning sont commercialisés comme s’ils avaient une capacité intelligente (d’apprentissage), ce qui entraîne de la confusion. Les systèmes dotés de deep learning sont un type ou un sous-ensemble de « l’intelligence artificielle ».
Les ingénieurs en deep learning utilisent un petit ensemble d’objets comme base d’apprentissage et apprennent au programme informatique (algorithme) à reconnaître un large éventail d’objets en fonction des caractéristiques du petit échantillon. Par exemple, si vous pouvez reconnaître quelques types de panneaux d’arrêt, vous pouvez appliquer ces connaissances pour reconnaître de nombreux autres types de panneaux d’arrêt.
Le programme de deep learning apprend des fonctionnalités indépendantes aux objets, afin qu’il puisse se généraliser sur un large spectre d’objets. Par exemple, grâce à un tel programme, les robots peuvent reconnaître le bord d’un objet, quelle que soit l’exposition de la caméra ou les conditions d’éclairage.
Les systèmes dotés de deep learning ne reposent pas sur qu’une seule variable, telle que la couleur, car une chose aussi simple qu’un changement d’exposition ou un éclairage ruinerait le résultat. La couleur peut être l’une des variables, mais d’autres variables plus abstraites sont utilisées pour la reconnaissance d’objets dans le programme de deep learning.
À titre de comparaison, ces systèmes dotés de deep learning utilisés pour les applications robotiques de sélection sont comme conduire une Tesla en mode entièrement autonome. Garez-vous n’importe où et naviguez de A à B, en utilisant le meilleur itinéraire de voyage dans (la plupart) des conditions météorologiques, sur tous les types de routes.
Eléments fondamentaux des systèmes de deep learning
Les principes du deep learning utilisés par les robots industriels sont semblables à ceux utilisée pour les voitures autonomes Tesla. Les voitures autonomes reconnaissent différentes formes, tailles, couleurs et emplacements pour les panneaux d’arrêt. Une fois identifié comme un panneau d’arrêt, l’algorithme calcule une réponse en fonction de variables externes, telles que l’emplacement et la direction du mouvement des autres voitures, des piétons, des caractéristiques routières, etc., et ces calculs doivent être rapides.

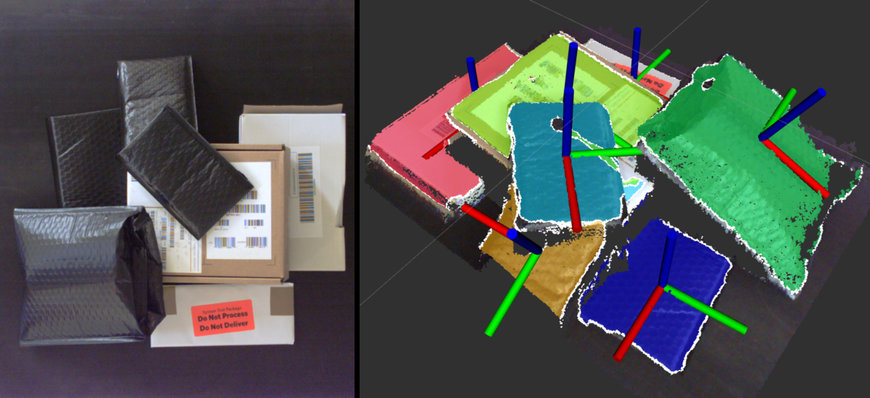
Les robots guidés par vision avec des logiciels deep learning pour des applications industrielles reconnaissent divers types d’emballage, d’emplacement et d’autres variables (par exemple, des articles partiellement enfouis sous d’autres emballages) et l’action directe de la machine en fonction de ces variables. Par rapport aux voitures autonomes, certaines des variables pour les robots industriels ne sont pas aussi complexes, mais l’approche sous-jacente pour apprendre et réagir rapidement est la même.
Il existe trois exigences pour les solutions deep learning : la puissance de traitement de l’ordinateur, des données variées et de bonne qualité, et des algorithmes deep learning. Chacune des exigence dépend de l’autre.
Puissance de traitement de l’ordinateur
Il y a vingt ans, le plus grand super-ordinateur du monde était capable de 12 téraflops (12 mille milliards de calculs par seconde). Ce super-ordinateur consommait 850 000 watts de puissance, ce qui est suffisant pour alimenter plusieurs dizaines de foyers. Aujourd’hui, la Tesla Model S est équipée de 10 Teraflops de puissance de calcul !
Alors que jouer à des jeux vidéo intenses en graphiques dans votre Tesla est tout à fait possible, la vraie raison pour laquelle nous avons besoin de toute la puissance de calcul est que la conduite autonome nécessite l’exécution d’algorithmes deep learning. Il y a 5 ou 10 ans seulement, la puissance de traitement requise pour développer et commercialiser des algorithmes deep learning destinés aux détaillants et aux fabricants de tous les jours n’existait pas.
Les données… pas seulement plus, mais des variations plus complexes
Les algorithmes deep learning deviennent meilleurs à mesure qu’ils rencontrent des données plus complexes et variées. L’amélioration de l’algorithme dépend de la qualité des données, pas seulement de la quantité. De nouvelles variations de données (objets), qui ne sont pas similaires aux objets connus et existants, permettent d’améliorer l’algorithme. L’algorithme est entrainé pour classer les nouveaux objets en fonction de variables de plus haut niveau.
Dans le cas de Fizyr, lorsque l’algorithme ne parvient pas à segmenter correctement les objets dans le système actuel, les exemples négatifs sont utilisés pour ré-entrainer le modèle. C’est ce que l’on entend par apprentissage continu. Bien sûr, l’objectif est de réduire le nombre d’exemples négatifs.
Les algorithmes deep learning n’ont pas de seuil où l’augmentation de données (meilleures et plus variées) ne conduit pas à une amélioration des performances. C’est pourquoi des entreprises comme Fizyr, qui déploient leurs algorithmes deep learning dans des applications commerciales depuis plusieurs années, ont un avantage significatif sur les nouveaux fournisseurs. Plus d’expérience conduit à de meilleurs algorithmes, ce qui conduit à de meilleures performances du système.
Algorithmes deep-learning
L’algorithme doit être efficace pour maximiser la combinaison des données disponibles et de la puissance de traitement. Les sorties de l’algorithme sont des instructions qui peuvent être exécutées par la machine (robot ou voiture).
Les algorithmes deep learning classent les données dans de nombreux niveaux ou catégories. Les niveaux d’identification sont ce qui rend l’apprentissage « profond ». En comparant avec le sport : quel sport, type de balle, conditions de terrain, direction du jeu, emplacement et direction du mouvement des autres joueurs, mouvement de balle, action souhaitée – But ! En mode d’apprentissage, l’algorithme deep learning calcule toutes les entrées et variables (un mille milliard de calculs par seconde) et vous demande de lancer la balle dans une certaine direction et avec une certaine force avec votre pied gauche, ce qui fait que la balle se déplace vers le coin supérieur droit du filet. But !

La puissance de traitement en union avec des algorithmes intelligents donne la vitesse. Prenez une photo, transmettez les données, classez, déterminez les résultats souhaités et émettez des instructions exécutables - en une seconde ou moins. Les algorithmes de Fizyr fournissent plus de 100 poses de saisie chaque seconde, avec une classification pour gérer les objets différemment, y compris pour effectuer des contrôles de qualité et détecter les défauts. Des performances époustouflantes qui ne sont possibles qu’avec des algorithmes intelligents et des ordinateurs rapides. De meilleures données permettent des algorithmes plus intelligents. C’est un cercle vertueux.
Fizyr a optimisé les trois éléments requis pour la robotique guidée par vision. La puissance de traitement optimisée avec un algorithme efficace. Un ensemble de données unique et de haute qualité construit sur de nombreuses années. Des algorithmes deep learning intelligents qui ont été entrainés au travers d’expériences variées sur des applications commerciales.
Systèmes de vision doté de deep learning pour robots industriels guidés par vision
Les applications commerciales utilisant des robots pour sélectionner, placer, mettre en palette ou dépalettiser dans les entrepôts nécessitent trois éléments fondamentaux : caméras, logiciels et robots. Les caméras et les robots sont les yeux et les bras. Le logiciel, c’est le cerveau.
L’algorithme deep learning assimile un flux de données à partir des caméras et fournit des instructions aux robots. Les caméras et les robots doivent être adaptés à l’application, mais ne fournissent pas l’intelligence. Les trois composants doivent fonctionner ensemble pour optimiser les performances du système.
Technologie des caméras
La technologie de la caméra permet un flux de données de haute qualité. Les caméras et le post-traitement d’image fournissent un flux de données prêt à être évalué par l’algorithme deep learning. Bien que la technologie de la caméra soit importante, à bien des égards, elle est comparable à un ordinateur ou à un robot. Certaines caméras fournissent des images de meilleure qualité ou sont mieux adaptées à une application, mais la caméra elle-même n’est pas ce qui rend un robot guidé par vision capable d’apprentissage profond. La caméra fournit des données mais ne les traduit pas en commandes exploitables.
Logiciel
Le logiciel est l’algorithme deep learning - les données à partir des caméras, les processus, les résultats donnés par les robots.
Le robot et l’effecteur final
Le robot et l’effecteur final (aussi connu sous le nom de gripper ou pince) jouent également un rôle essentiel dans les performances du système. Ils doivent fournir le niveau de portée, la force de saisie, la dextérité et la vitesse requis pour l’application. Le robot et l’effecteur final répondent aux commandes de l’algorithme deep learning. Sans lui, le robot répondrait à des commandes préprogrammées et préconfigurées.
Téléchargez l’article au format PDF ici
Résumé
Il y a trois choses à retenir lorsque vous lisez sur l’intelligence artificielle et les systèmes robotiques guidés par vision :
- Les algorithmes deep learning classent les données en plusieurs niveaux ou catégories.
- Les algorithmes deep learning nécessitent à la fois des données variées et de bonne qualité.
- Les algorithmes deviennent plus puissants au fur et à mesure de leur utilisation. C’est l’expérience sur le long terme qui compte.
Les progrès récents de la technologie des caméras et du traitement informatique fournissent les éléments de base sur lesquels les logiciels avancés dotés de deep learning permettent des performances robotiques qui se rapprochent de l’intelligence artificielle. Le futur est là !
www.fizyr.com
Auteur (invite): John Ripple
John Ripple est le cofondateur d’Esoteric Staffing, un vétéran de l’industrie de la manutention automatisée et conseiller pour les entreprises industrielles de robotique. Sa carrière couvre toute la gamme : administration, ventes, concept et conception, gestion de projet et support après-vente. John Ripple écrit sur l’industrie de l’automatisation des entrepôts chez Esoteric Staffing et peut être contacté à l’adresse e-mail suivante : This email address is being protected from spambots. You need JavaScript enabled to view it.
