20 ans de réseaux embarqués pour l’automobile
Joseph Notaro, Vice-Président Stratégie et Développement Automobile mondial, ON Semiconductor.
Les véhicules sont de plus en plus sophistiqués et, par rapport à ce qu’ils étaient il y a une vingtaine d'années, les changements sont majeurs. A cette époque, les véhicules étaient essentiellement mécaniques, avec quelques sous-systèmes hydrauliques pour le freinage, tandis que l'électronique se limitait en fait à de simples circuits d'éclairage, aux systèmes d'allumage et de recharge de la batterie. Il était envisageable d'utiliser un faisceau électrique pour établir des connexions directes entre les (relativement peu nombreux) sous-systèmes électroniques du véhicule, et même si les faisceaux de certains véhicules étaient plus complexes, cette approche restait possible en pratique.
Même après l’introduction des premiers systèmes audio embarqués, les besoins en câblage sont restés relativement modestes, avec seulement l’alimentation et des connexions simples aux haut-parleurs et à l'antenne. Au début du siècle, la quantité d'électronique dans les véhicules a commencé à augmenter de manière significative, grâce à des technologies comme l’ABS pour éviter le blocage des roues au freinage, et aux capteurs de collision commandant le déploiement des airbags. Cela a conduit à l'introduction d'un nouveau paradigme basé sur des unités de commande électronique (ECU) distribuées ou organisées comme des satellites.
La technologie a continué de proliférer et des systèmes électroniques très fiables sont devenus indispensables à la sécurité, à l'efficience et au confort des véhicules qui sont aujourd'hui sur nos routes. Nombre de ces fonctions ont vocation à aider le conducteur à garder le contrôle du véhicule, grâce à une assistance de puissance fournie aux systèmes de direction, de freinage, de traction et de couple. Plusieurs fonctions, dont les programmes de stabilité électronique (ESP), la direction assistée électrique (EPS), la suspension active et l'ABS, entrent dans cette catégorie. Des systèmes moins critiques dans les véhicules comme l'éclairage, les essuie-glaces, la centralisation des portières, vitres et toits ouvrants, des systèmes d'info-divertissement de plus en plus sophistiqués, sont également commandés électroniquement, chacun étant doté de son propre module de commande, qui doit communiquer avec les autres systèmes au sein du véhicule.
Récemment, davantage de systèmes avancés d'aide à la conduite (ADAS) font leur entrée dans les véhicules, y compris dans des modèles d'entrée de gamme. Ces systèmes complexes utilisent de multiples capteurs très sophistiqués pour assurer plusieurs fonctions de sécurité et de confort.
Par exemple, des caméras dédiées ADAS permettent de proposer des fonctionnalités supplémentaires, comme la vue à 360º pour aider au stationnement. Certains véhicules haut de gamme sont aujourd’hui équipés d'une douzaine de caméras. Etant donné que ces systèmes s’appuient essentiellement sur des caméras pour les fonctions de sécurité, le besoin de résolution supérieure augmente, ce qui se traduit par des quantités toujours plus importantes de données à transmettre de manière fiable et sûre, sans aucune latence au sein du véhicule.
Il est clair que le développement de cette technologie dans les voitures n'aurait pas été possible si les constructeurs automobiles n'avaient pas abandonné le faisceau électrique classique. Ils se sont donc tournés vers le multiplexage et la mise en réseau pour améliorer la connectivité, tout en réduisant les connexions physiques entre les systèmes.
Protocoles de réseaux embarqués pour l’automobile
Même les véhicules d'entrée de gamme font aujourd’hui appel à des dizaines d'ECU, ce qui sous-entend des centaines, voire des milliers, de signaux à acheminer au sein du véhicule. Un faisceau électrique, avec ses connecteurs associés, capable d'acheminer tous les signaux d'alimentation et de données au sein d'un véhicule moderne serait si long, si lourd, si complexe et si coûteux, qu'il serait impossible à réaliser en pratique. En outre, chaque faisceau de câbles serait spécifiquement adapté à un modèle unique au sein d'une famille de véhicules. Les réseaux embarqués pour l’automobile répondent à ces problèmes, mais imposent certaines considérations en matière de conception.
Les cahiers des charges des ECU et de leurs systèmes associés peuvent être très différents, selon les dispositifs et leurs fonctions. Des paramètres tels que la vitesse et la bande passante, le jitter et le temps de réponse (latence) autorisés, ou encore le niveau de redondance, varient tous considérablement et ont un impact sur les besoins de connectivité et, dans une certaine mesure, sur le protocole réseau choisi. Par exemple, une caméra orientée vers l'avant, qui fait partie d'un système ADAS, transmet en permanence des quantités importantes de données hautement critiques, alors qu’un capteur qui fournit des informations sur le niveau de carburant ne transmet qu'un simple paquet de données à une fréquence relativement faible.
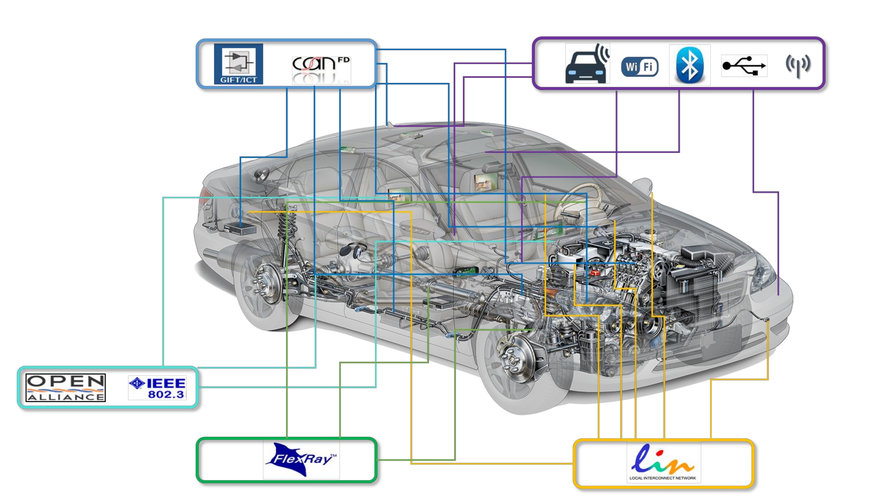
Au fil du temps, un certain nombre de réseaux embarqués pour l’automobile sont apparus pour répondre à la croissance des besoins de transmission de données au sein des véhicules.
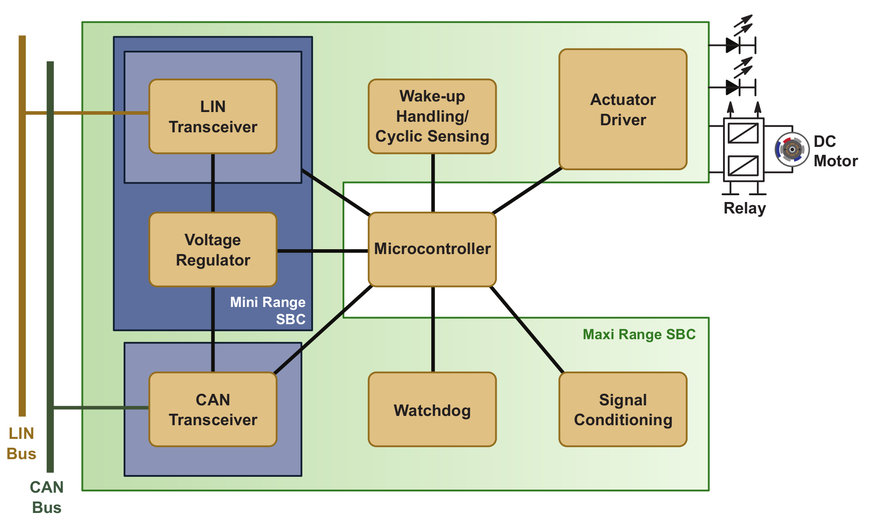
- Réseau LIN (Local Interconnect Network) : Le réseau LIN offre une bande passante relativement faible, pour des débits jusqu'à 20 kbits/s, et il est donc surtout utilisé dans les sous-systèmes dont les maîtres-mots sont coût réduit et simplicité.
- Réseau CAN (Controller Area Network) : Cette norme, développée par Robert Bosch dans les années 80 et devenue une norme ISO en 1994, correspond au réseau embarqué automobile le plus largement utilisé, avec des centaines de millions de nœuds mis en œuvre chaque année. Offrant des vitesses jusqu'à 1 Mbits/s, il sert principalement à connecter les ECU aux différents capteurs. Un réseau CAN offre des fonctions de multiplexage permettant de partager les capteurs entre plusieurs ECU. Le CAN utilise une simple paire en cuivre torsadée et permet d’économiser jusqu'à 40% des fils par rapport à un câblage classique.
- Bus de communication FlexRay : Comme le CAN était limité par sa vitesse, le protocole FlexRay a été développé pour fournir des débits réseau jusqu'à 10 Mbits/s pour des applications comme le drive-by-wire (accélérateur à commande électrique) et le steer-by-wire (direction à commande électrique) entre autres. Le protocole FlexRay peut s'adapter à plusieurs topologies de réseau.
- Réseau MOST (Media Oriented Systems Transport) : MOST (Media Oriented Systems Transport, ou transport système orienté média) est une norme propriétaire, développée pour transporter des signaux audio, vidéo, voix et données, à des vitesses allant jusqu'à 150 Mbits/s.
Ces protocoles ont continué d’évoluer pour répondre aux besoins changeants (et croissants) des véhicules modernes. Par exemple, Robert Bosch a présenté une nouvelle version du CAN lors de la Conférence Internationale CAN en 2012. Cette nouvelle version, dénommée CAN FD, combine les caractéristiques de base du CAN, avec un débit de données plus élevé et une charge utile de données plus importante.
Segmentation au sein des réseaux embarqués pour l’automobile
En termes de latence et de réactivité du réseau, les différents sous-systèmes d'un véhicule ont des besoins différents. Cela influence le choix du protocole du réseau embarqué utilisé. Par exemple, un signal "steer-by-wire" est beaucoup plus important qu'une demande de changement de station radio, et le réseau doit être configuré en fonction.
En général, un véhicule est divisé en plusieurs domaines regroupant différentes caractéristiques, fonctionnalités et exigences. Pour des raisons de sécurité, d'émissions et de législation, deux domaines courants - le groupe motopropulseur (contrôle du moteur et de la transmission) et le châssis (contrôle de la suspension, de la direction et du freinage) - ont généralement des exigences de réponse "temps-réel". La commande moteur est fondamentale pour respecter les réglementations en matière d’émissions polluantes et de rejet de particules fines, et aussi pour garantir le maintien du meilleur niveau d'efficacité énergétique. Ce type de commande nécessite un échantillonnage rapide des capteurs (de l'ordre de la milliseconde) et des microcontrôleurs relativement puissants, ainsi que des échanges de données fréquents avec les autres domaines du véhicule.
Le domaine châssis est essentiel à la sécurité, car il comprend les fonctions de stabilité, l'ABS et, de plus en plus maintenant, la direction à commande électrique. Les exigences en matière de données sont similaires à celles du domaine groupe motopropulseur, bien que l'aspect sécurité impose des exigences qui peuvent être mieux traitées avec des techniques réseau à déclenchement temporel ou déterministe. Dans le domaine habitacle, il existe une grande variété de fonctions, notamment les éclairages, les vitres, les portières, la climatisation, les essuie-glaces et bien d'autres. Ces fonctions ont tendance à échanger entre elles des paquets de données de taille modeste, principalement pour répondre aux commandes des occupants du véhicule.
La télématique et l'info-divertissement représentent une part croissante des communications au sein des véhicules, et englobent les systèmes de navigation, les kits mains-libres, les systèmes audio et les diagnostics à distance. Ce domaine n'est pas soumis à des délais de réponse critique, mais gère des flux de données multimédia pour lesquels l'intégrité du signal et la confidentialité des données sont les contraintes les plus importantes. Les véhicules étant de plus en plus connectés entre eux et au monde qui les entoure, les communications sans fil et la sécurité qui y est associée, prennent ici une importance croissante.
Alors que le groupe motopropulseur, le châssis, l’habitacle et la télématique sont les quatre domaines principaux, l'essor des fonctions de sécurité telles que les capteurs d'impact, le déploiement des airbags, le maintien dans la voie, le régulateur de vitesse adaptatif (ACC pour Adaptive Cruise Control) ou la surveillance du conducteur, a conduit à définir un nouveau domaine, aujourd'hui communément appelé "sécurité active et passive".
L'avenir des réseaux embarqués pour l’automobile
La vitesse de développement et l'ajout de nouvelles fonctions dans les véhicules met à l'épreuve la capacité de nombreux protocoles réseau existants. Les constructeurs automobiles se tournent désormais vers l'industrie électronique pour identifier les protocoles capables de gérer les avancées actuelles et futures de la technologie automobile.
La complexité des véhicules ne cesse de croître, et les communications avec les autres véhicules et l’infrastructure environnante, comme les villes connectées, devenant courantes, l'architecture des véhicules va changer. Il est probable qu'Ethernet devienne la technologie de réseau embarqué dominante, en facilitant la transition de communications basées sur des signaux, vers des architectures orientées services.
Ethernet est souvent considéré comme l’option la plus probable pour l'avenir des réseaux embarqués pour l’automobile, car il permet l’unification autour d'une norme réseau unique pour l’ensemble du véhicule. Ethernet offre de nombreux avantages, notamment le fait d’être bien établi et bien compris, avec un approvisionnement facile en composants et les économies d'échelle qui vont avec. La bande passante disponible est de l’ordre du gigabits, sachant que les 10 Gbits sont en cours de développement.
L’un des problèmes que pose l’utilisation d’Ethernet comme réseau embarqué pour l’automobile est sa latence, qui le rend moins adapté aux applications critiques au niveau sécurité. Toutefois, de nouvelles avancées, telles que 10BASE-T1S qui est une norme 10 Mbits/s sans collision sur une seule paire torsadée, avec arbitrage intégré pour l'accès aux nœuds, ouvrent désormais la voie aux réseaux embarqués pour l’automobile du futur.